课程设计的任务是根据要求拟定和论证机器的主体机构的设计方案,并对选定方案进行运动分析,确定飞轮转动惯量,对进给凸轮机构和齿轮机构进行设计计算,最后完成设计图纸,设计说明书,打印源程序和计算结果、图表结果。课程设计包括,主体机构设计,凸轮机构设计,齿轮机构设计三个部分。主体机构为自定设计方案,进给凸轮机构和齿轮机构采用统一设计方案。我把matlab命令放下面了
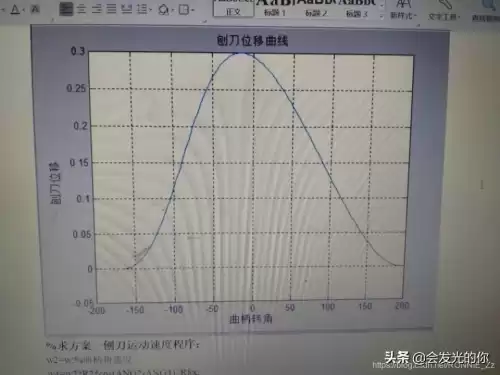
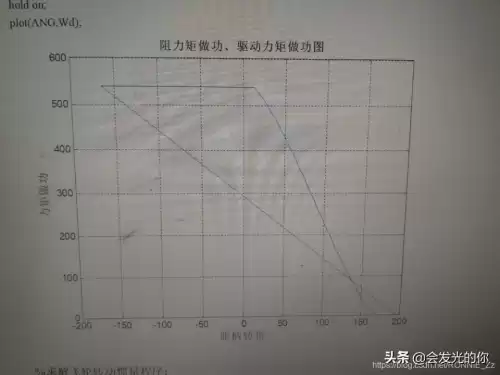
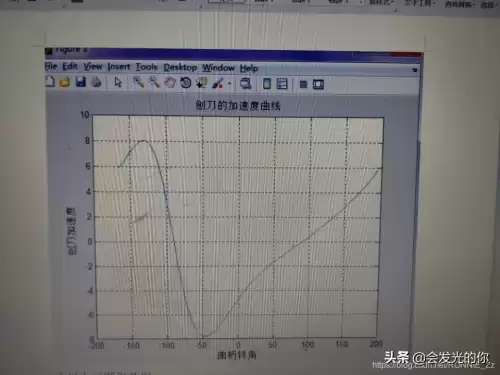
R2=0.090; %取曲柄长90mm\npi=3.14;degree=pi/180;H=0.30;n=64;P=9000;\n%H:行程300mm;P:切削力9000N;n:曲柄转速64r/min\nw=n*2*pi/64;\nANG40=105*degree;\nR4=H/2/sin(15*degree);\nR9=R2/sin(15*degree);\nR5=R4/4;\nR10=R4*(1-cos(15*degree));\nR1=R4-R10/2;\nANG50=asin(R10/2/R5);\nS0=R5*cos(ANG50)-R4*cos(ANG40);\nANG2=195*degree:-3*degree:(195-360)*degree;\n%曲柄转角ANG2从195度开始转,每隔-3度取点,转一周\nR8x=sqrt(R9^2+R2^2+2*R2*R9*sin(ANG2));\nANG4=acos(R2*cos(ANG2)./R8x);\nANG5=asin((R4*sin(ANG4)-R1)/R5);\nX=S0+R4*cos(ANG4)-R5*cos(ANG5); %刨刀位移量X\nANG=ANG2*180/pi; %将曲柄转角弧度转化为角度\nfigure(1);\nplot(ANG,X); %画出刨刀的位移曲线\nxlabel('曲柄转角'),ylabel('刨刀位移');\ntitle('刨刀位移曲线');\ngrid on;\nw2=w;%曲柄角速度\nw4=w2*R2*cos(ANG2-ANG4)./R8x;\nV8x=-w2*R2.*sin(ANG2-ANG4);\nw5=w4*R4.*cos(ANG4)./(R5*cos(ANG5));\nV=w5*R5.*sin(ANG5)-w4*R4.*sin(ANG4);\nfigure(2);\nplot(ANG,V); %画出刨刀的速度曲线\nxlabel('曲柄转角'),ylabel('刨刀速度');\ntitle('刨刀的速度曲线');\ngrid on;\nALPHA4=(-w2.^2*R2.*sin(ANG2-ANG4)-2*w4.*V8x)./R8x;\na8x=w4.^2.*R8x-w2.^2*R2.*sin(ANG2-ANG4);\nALPHA5=(w5.^2*R5.*sin(ANG5)+ALPHA4*R4.*cos(ANG4)-w4.^2*R4.*sin(ANG4))./(R5.*cos(ANG5));\na=ALPHA5*R5.*sin(ANG5)+w5.^2*R5.*cos(ANG5)-ALPHA4*R4.*sin(ANG4)-w4.^2*R4.*cos(ANG4);\nfigure(3);\nplot(ANG,a); %画出刨刀加速度曲线\nxlabel('曲柄转角'),ylabel('刨刀加速度');\ntitle('刨刀的加速度曲线');\ngrid on;\nMr=zeros(0,400);Wr=zeros(0,600);\nWd=zeros(0,400);\nfor i=1:361\n if(X(i)>0.05*H&X(i)<0.95*H&V(i)<0)%等效阻力矩Mr\n Mr(i)=P*abs(V(i))/w2;\n else\n Mr(i)=0;%在行程的前后0.05H和回程时Mr为零\n end\nend\nfigure(4);\nplot(ANG,Mr);%等效阻力矩、等效驱动力矩线图\nxlabel('曲柄转角'),ylabel('等效力矩');\ntitle('等效阻力矩、等效驱动力矩线图');\ngrid on;\n\nfor i=1:360\n Wr(i+1)=0.5*(Mr(i+1)+Mr(i))*abs(ANG2(i+1)-ANG2(i))+Wr(i);%阻力矩做功Wr\nend\nMd=Wr(361)/6.28;%等效驱动力矩\nhold on;\nplot(ANG,Md,'b');\nfigure(5);\nplot(ANG,Wr);%阻力矩做功\ntitle('阻力矩做功、驱动力矩做功图');\ngrid on;\nMd;%输出等效驱动力矩值\n%求解驱动力矩做功\nWd(1)=0;\nfor i=1:360\n Wd(i+1)=Md*abs(ANG2(i+1)-ANG2(i))+Wd(i);%驱动力矩做功Wd\nend\nhold on;\nplot(ANG,Wd);\nDLT=0.15; %速度不均匀系数为0.15\nE=Wd-Wr; %机构的能量\nDLTWmax=max(E)-min(E); %最大盈亏功\nJF=DLTWmax/(w^2*DLT); %飞轮转动惯量\nDLTWmax;JF; %输出最大盈亏功和飞轮转动惯量值\n123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081
运行结果如下